





KORANMANDALA.COM – Drone pemetaan modern dilengkapi kamera resolusi tinggi, modul GNSS, dan perangkat lunak pemrosesan data canggih yang memungkinkan pengukuran presisi dan citra udara detail, sehingga dapat menghasilkan peta topografi akurat, model 3D, dan perhitungan volumetrik.
Hasil keluaran utama berupa peta ortomosaik, model elevasi digital (DEM), point cloud, dan rekonstruksi 3D. Artikel ini membahas komponen utama drone pemetaan, fungsi masing-masing dalam konteks pemetaan, dan pengaruhnya terhadap akurasi, efisiensi, serta kualitas data.
Sistem UAV (Pesawat Tanpa Awak)
Sistem UAV mencakup rangka pesawat (fixed-wing atau multirotor), motor/penggerak, baterai, dan flight controller (autopilot). Desain fisik dan kapasitas payload menentukan durasi terbang dan area cakupan. Misalnya, DJI Matrice 350 RTK memiliki masa terbang hingga 55 menit dan dukungan multi-payload, sehingga mampu mengumpulkan data resolusi tinggi dalam area luas.
Flight controller terintegrasi memanfaatkan data GNSS dan IMU untuk menjaga stabilitas dan jalur terbang presisi. Kombinasi platform yang stabil dan endurance tinggi memperpanjang waktu survei sekaligus mengurangi gangguan lapangan, meningkatkan efisiensi misi pemetaan.
Sensor Kamera dan Gimbal
Kamera pada drone pemetaan umumnya beresolusi tinggi (misal 20+ megapiksel) dengan shutter mekanis. Shutter mekanis mengekspos seluruh frame secara bersamaan sehingga menghilangkan distorsi rolling shutter yang dapat terjadi saat drone bergerak cepat.
Hal ini penting untuk memastikan ketajaman gambar dan akurasi posisi. Kamera dipasang di gimbal 3-sumbu yang menstabilkan orientasi sensor selama penerbangan. Gimbal mengompensasi getaran dan manuver angin, mencegah gambar buram akibat gerakan mendadak.
Kualitas kamera dan stabilisasi menentukan kerapatan titik penginderaan (ground sample distance) dan konsistensi overlap antar foto, sehingga langsung memengaruhi ketelitian orthomosaik dan model 3D akhir.
Baterai dan Sistem Daya
Baterai adalah sumber daya utama bagi semua komponen drone, termasuk motor, sensor, GNSS, dan perangkat komunikasi. Drone pemetaan profesional biasanya menggunakan baterai lithium-polymer (Li-Po) berkapasitas tinggi untuk mendukung durasi terbang panjang.


Kapasitas baterai menentukan endurance penerbangan, yang secara langsung memengaruhi luas area yang dapat dipetakan dalam satu misi. Sebagai contoh, drone dengan baterai 6.000 mAh hingga 12.000 mAh dapat bertahan antara 25 hingga 55 menit tergantung beban muatan dan kondisi angin.
Beberapa sistem menggunakan baterai ganda (dual battery) untuk redundansi dan keselamatan. Efisiensi daya dan sistem manajemen baterai yang baik juga mengurangi risiko gagal terbang akibat tegangan rendah atau overheating. Dalam konteks pemetaan, manajemen baterai sangat penting agar misi berjalan tuntas tanpa kehilangan data akibat pemadaman mendadak.
Sistem GNSS/RTK/PPK
Sistem GNSS (Global Navigation Satellite System) pada drone pemetaan menggunakan penerima multi-konstelasi (GPS, GLONASS, Galileo, dsb.) berakurasi survei. GNSS menggeotag setiap foto dengan koordinat geografis, memungkinkan georeferensi citra.
Untuk meningkatkan akurasi, drone pemetaan profesional dilengkapi modul RTK (Real-Time Kinematic) yang menerima koreksi dari stasiun dasar secara real-time. Dengan RTK, posisi drone dapat mencapai akurasi tingkat sentimeter. Alternatifnya, mode PPK (Post-Processed Kinematic) merekam data GNSS selama penerbangan dan mengolahnya setelahnya dengan data base station, menghasilkan akurasi serupa tanpa koneksi real-time.


Kombinasi GNSS/RTK/PPK ini memungkinkan georeferensi langsung (direct georeferencing) pada sensor dengan akurasi tinggi, sehingga secara drastis mengurangi kebutuhan penandaan titik kontrol lapangan (GCP).
Inertial Measurement Unit (IMU)
IMU adalah sensor inersia yang terdiri dari akselerometer dan giroskop untuk mengukur percepatan dan rotasi drone secara real-time. Data IMU digunakan flight controller untuk menentukan orientasi (roll, pitch, yaw) dan menjaga stabilitas penerbangan.
Dalam sistem GNSS–INS terintegrasi, data satelit GNSS dipadukan dengan keluaran IMU untuk menghitung posisi dan orientasi secara akurat. Sebagai contoh, Trimble APX UAV mengombinasikan sinyal GNSS dengan kecepatan sudut dan percepatan dari sensor inersia, menghasilkan solusi posisi dan orientasi berfrekuensi tinggi dan akurasi tinggi.
Output GNSS+IMU memungkinkan drone mengetahui posisi sebenarnya pada titik kamera atau sensor laser, sehingga gambar dan data LiDAR langsung tergeoreferensi dengan tepat. Ketepatan IMU berkontribusi pada akurasi pengukuran orientasi dan membantu komputasi peta tanpa banyak titik kontrol.
Sensor LiDAR
Beberapa drone pemetaan dilengkapi sensor LiDAR yang memancarkan pulsa laser dan mengukur waktu pantulannya untuk mendapatkan jarak objek. LiDAR menghasilkan point cloud 3D yang sangat padat dan akurat.


Teknologi ini unggul dalam menghasilkan akurasi absolut tinggi—terutama akurasi vertikal—karena data ketinggian diukur langsung oleh pulsa cahaya. Selain itu, sinar LiDAR dapat menembus celah vegetasi hingga mencapai permukaan tanah, sehingga medan berkontur dan area berhutan tetap terpetakan dengan tepat. LiDAR juga efektif bekerja di kondisi minim cahaya (misal survei malam), menambah fleksibilitas pengambilan data. Data LiDAR biasanya diolah menjadi point cloud dan model elevasi yang melengkapi output fotogrametri.
Perangkat Lunak Pemrosesan Data
Perangkat lunak pemrosesan (fotogrametri) mengolah kumpulan citra beririsan menjadi peta dan model 3D. Setelah misi terbang selesai, foto-foto geotag dapat diimpor ke software seperti Pix4Dmapper, Agisoft Metashape, DJI Terra, atau lainnya untuk menyusun ortomosaik, model elevasi, dan point cloud.

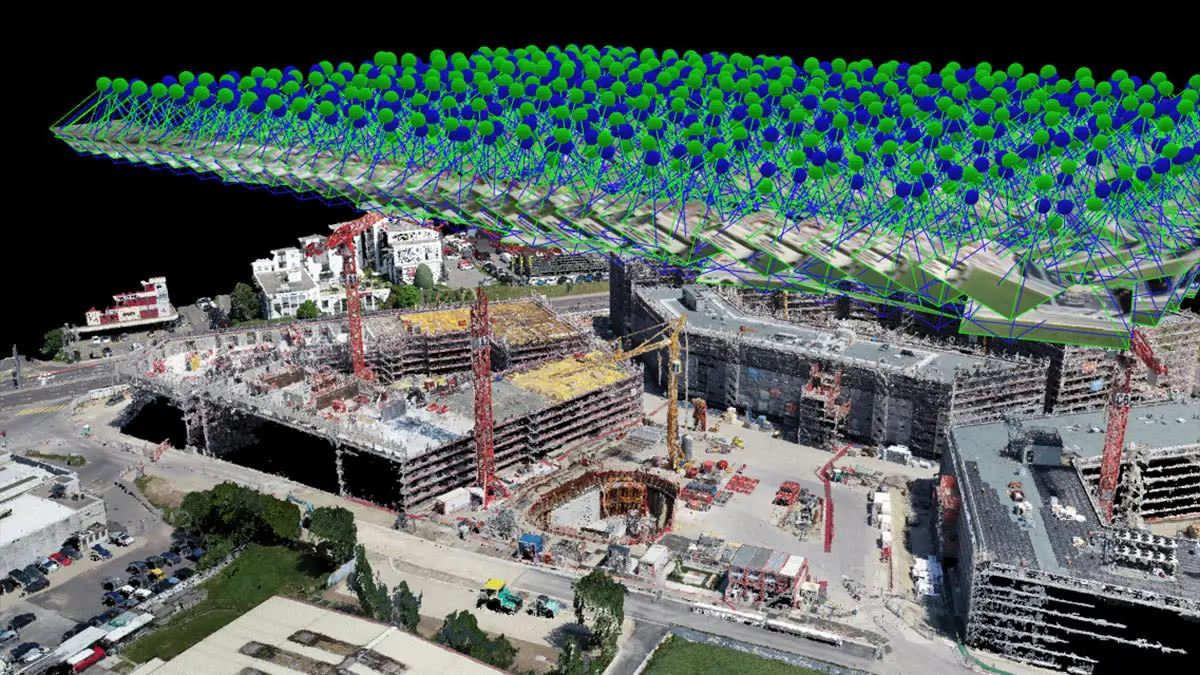
Proses ini melibatkan algoritma Structure-from-Motion yang mencocokkan fitur di banyak citra sehingga menghasilkan rekonstruksi 3D akurat. Perangkat DJI GS Pro, misalnya, secara otomatis merencanakan jalur terbang optimal, kemudian data foto yang dihasilkan dapat dimasukkan ke software 3D mapping untuk membangun peta.
Efisiensi dan ketelitian hasil akhir sangat tergantung pada kualitas software, jumlah overlap foto, penggunaan GCP/PPK, serta parameter pemrosesan.
Stasiun Kontrol Darat (Ground Control Station)
Ground Control Station (GCS) adalah pusat kendali penerbangan drone di darat. GCS (biasanya berupa tablet atau komputer) digunakan untuk merencanakan misi pemetaan, seperti menentukan area survei, jalur terbang, ketinggian, kecepatan, dan tingkat overlap foto.


Selama penerbangan, GCS menampilkan data telemetri real-time (posisi GPS, orientasi, status baterai, dsb.) dan dapat mengambil alih kontrol jika diperlukan. Sebagai contoh, aplikasi DJI GS Pro dapat secara otomatis membuat jalur terbang grid berdasarkan zona yang ditentukan dan parameter kamera, lalu menyimpan data misi untuk pemrosesan lebih lanjut. Fitur-fitur ini memastikan misi pemetaan terlaksana konsisten, aman, dan data penerbangan terorganisir dengan baik.
Setiap komponen drone pemetaan berkontribusi pada akurasi dan efisiensi keseluruhan. Platform UAV yang stabil dan berdaya jelajah lama meningkatkan cakupan area; kamera beresolusi tinggi dengan gimbal menghasilkan citra tajam; GNSS/RTK/PPK serta IMU memberikan georeferensi presisi sentimeter; perangkat lunak canggih mengubah data mentah menjadi peta terstandarisasi.
Teknologi terkini seperti LiDAR menambah ketelitian, terutama dalam mengukur elevasi. Komponen penunjang seperti sistem baterai dan ground control station turut menjamin keberhasilan misi. Dengan integrasi sistem tersebut, drone pemetaan modern mampu menghasilkan data geospasial berkualitas tinggi dengan efisiensi melebihi metode konvensional.







